خانه
اپلیکیشن زینگ
آشنایی و همکاری
سامانه صادرات و واردات
فروشگاه
خدمات اطلاعاتی
اخبار و مقالات
تماس با ما


عوامل غیرخطی رایج:
در اغلب سیستم های کنترل، نمی توانیم از حضور عوامل غیرخطی مشخص جلوگیری کنیم. سیستمی که در آن رابطه غیرخطی بین ورودی و خروجی وجود داشته باشد، که شامل معادله دیفرانسیل نباشد، یک غیرخطی استاتیک نامیده می شود.

از طرف دیگر، ورودی و خروجی ممکن است از طریق یک معادله دیفرانسیل غیرخطی مرتبط باشند. به چنین سیستمی غیرخطی پویا گفته می شود.
اکنون انواع مختلف عوامل غیرخطی بودن را در یک سیستم کنترل مورد بحث قرار می دهیم:
غیرخطی اشباع:
غیرخطی اشباع نوع متداول غیرخطی است. به عنوان مثال، این غیرخطی بودن را در اشباع در منحنی مغناطیسی موتور DC مشاهده می کنیم.
برای درک این نوع غیرخطی بودن، منحنی اشباع یا منحنی مغناطیسی شکل زیر را بررسی می کنیم.
از منحنی فوق می توان چنین دریافت که خروجی نشان دهنده رفتار خطی در ابتدای کار است، اما پس از آن اشباع در منحنی وجود دارد که یک نوع رفتار غیرخطی در سیستم محسوب می شود. منحنی تقریبی نیز در شکل نشان داده شده است.
این نوع غیرخطی اشباع را می توانیم در یک آمپلی فایر که خروجی آن فقط در بازه محدودی از مقادیر ورودی متناسب با آن است مشاهده کنیم. هنگامی که ورودی از این دامنه فراتر رود، خروجی تمایل به غیرخطی شدن پیدا می کند.
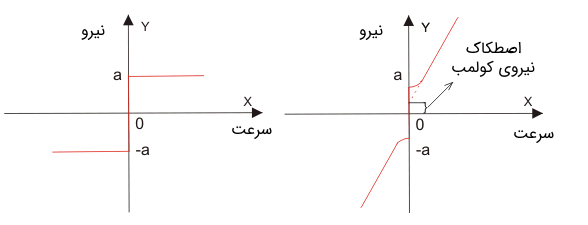
غیرخطی اصطکاک:
هر چیزی که مخالف حرکت نسبی جسم باشد، اصطکاک نامیده می شود. غیرخطی بودن ناشی از اصطکاک نوعی غیرخطی بودن است که در سیستم وجود دارد. مثال رایج در موتور الکتریکی است که در آن اصطکاک نیروی کولمب را به دلیل تماس مالش بین جاروبک ها و کموتاتور مشاهده می کنیم.
اصطکاک در سه دسته زیر تقسیم بندی می شود:
اصطکاک جنبشی را می توان به عنوان (الف) اصطکاک لغزشی (ب) اصطکاک غلتشی طبقه بندی کرد. اصطکاک لغزشی هنگامی عمل می کند که دو جسم روی یکدیگر قرار گرفته باشند، در حالی که دیگری در هنگام غلتش یک جسم روی دیگری عمل می کند.
در سیستم مکانیکی دو نوع اصطکاک وجود دارد: (الف) اصطکاک ویسکوز (ب) اصطکاک استاتیک یا ایستایی.
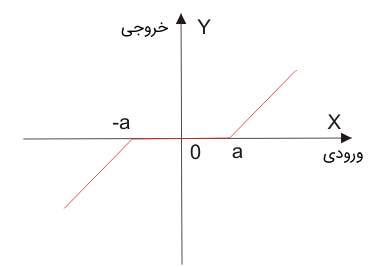
غیرخطی ناحیه مرده:
غیرخطی ناحیه مرده در دستگاه های الکتریکی مختلف مانند موتورها، سروو موتورهای DC، محرک ها و غیره وجود دارد. غیرخطی نوع ناحیه مرده به شرایطی اطلاق می شود که خروجی در هنگام عبور از مقدار محدودکننده خاصی، صفر می شود.
غیرخطی رله (کنترل کننده روشن/خاموش):
رله های الکترومکانیکی به کرات در سیستم های کنترلی که به یک سیگنال کنترل دو یا سه وضعیتی نیاز دارند به کار می روند. این رله ها کنترل کننده روشن/خاموش یا کنترل کننده دووضعیتی نیز نامیده می شوند. رله غیرخطی (الف) روشن/خاموش (ب) روشن/خاموش با هیسترزیس (ج) روشن/خاموش با ناحیه مرده است.
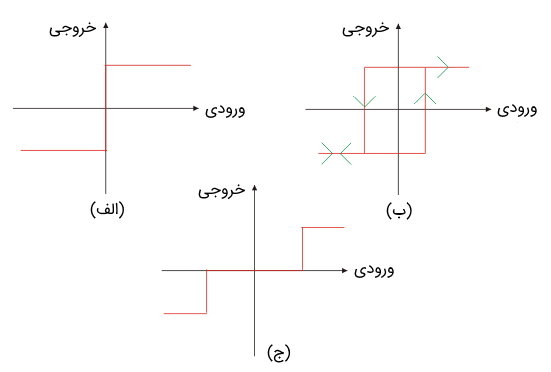
شکل (الف) ویژگی های ایده آل یک رله دوطرفه را نشان می دهد. در عمل، رله فوراً پاسخ نخواهد داد. برای جریان های ورودی بین دو لحظه سوئیچینگ (کلیدزنی)، رله، بسته به سابقه قبلی ورودی، ممکن است در موقعیت خاصی قرار داشته باشد.
این ویژگی روشن/خاموش هیسترزیس نامیده می شود که در شکل (ب) نشان داده شده است. یک رله همچنین در عمل دارای مقدار مشخصی از ناحیه مرده است که در شکل (ج) نشان داده شده است. ناحیه مرده به این دلیل ایجاد می شود که سیم پیچ میدان رله برای جابه جایی آرمیچر به مقدار محدودی جریان نیاز دارد.
غیرخطی لقّی:
یکی دیگر از غیرخطی های مهم که معمولاً در سیستم فیزیکی رخ می دهد، هیسترزیس در انتقال های مکانیکی مانند دندانه های چرخ دنده و رابط ها است. این نوع غیرخطی تا حدودی با هیسترزیس مغناطیسی متفاوت است و معمولاً به آن غیرخطی لقی گفته می شود.
لقی در حقیقت بازی بین دندانه های چرخ دنده ها است. یک جعبه دنده همان طور که در شکل (الف) نشان داده شده است، دارای لقی است که در شکل (ب) مشخص شده است.
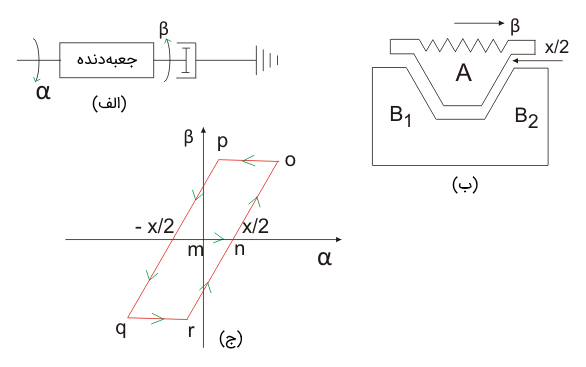
شکل (ب) دندانه A چرخ دنده را که بین دندانه های B1وB2 چرخ دنده دیگر قرار دارد نشان می دهد. شکل (ج) نمایانگر ارتباط بین حرکات ورودی و خروجی است.
از آنجا که دندانه A در این موقعیت در جهت عقربه های ساعت حرکت می کند، هیچ حرکتی روی خروجی صورت نمی گیرد تا زمانی که دندانه A پس از طی مسافتx/2با دندانهB1 تماس برقرار کند.
این حرکت خروجی با قطعهmn شکل (ج) مطابقت دارد. اگر نسبت چرخ دنده واحد فرض شود، دندانه در خلاف جهت عقربه های ساعت در همان زاویه چرخ دنده چرخانده می شود. این موضوع توسط خطno نشان داده شده است.
با وارون شدن حرکت ورودی، تماس بین دندانه هایAوB1 از بین می رود و دندانه براساس این فرض که بار با اینرسی قابل چشم پوشی کنترل شده، ثابت می شود.
بنابراین، حرکت خروجی تا زمانی که دندانهAمسافتx را در جهت معکوس طی کند، ادامه دارد. این موضوع، در شکل (ج) توسط بخش o p نشان داده شده است.
بعد از اینکه دندانه Aبا دندانهB2 تماس برقرار کرد، چرخ دنده، همان طور که توسط قطعهpq نشان داده شده است، در جهت عقربه های ساعت حرکت می کند.
با حرکت معکوس، چرخ دنده قطعهqrرا می سازد و سپس امتدادrn را دنبال می کند.






|
|

|

|
| نماد اعتماد الکترونیک | نشان ملی ثبت | گواهی شامد ارشاد |
![]()
![]()
![]()
![]()
![]()
![]()
© کلیه حقوق مادی و معنوی این وب سایت متعلق به داده پردازان هومان پویان می باشد.

