خانه
اپلیکیشن زینگ
آشنایی و همکاری
سامانه صادرات و واردات
فروشگاه
خدمات اطلاعاتی
اخبار و مقالات
تماس با ما


انواع تقارن در اتوماتای سلولی:
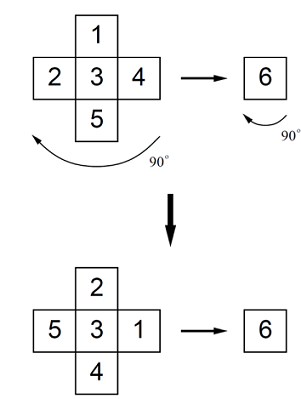
اگر یک تابع انتقال حالت برای تمام موقعیت هایی که هنگام چرخش با یکدیگر مشابه هستند، همیشه یک حالت یکسان را تولید کند، آن گاه مدل اتوماتای سلولی دارای «تقارن چرخشی» (Rotational Symmetry) است.

این چنین تقارنی همیشه در اتوماتای سلولی با هدف مدلسازی پدیده های فیزیکی مورد استفاده قرار می گیرد. یک تقارن چرخشی را قوی می گوییم، اگر تمام حالت های اتوماتای سلولی «گرایش آزاد» (Orientation Free) باشند و نیز اگر چرخش یک موقعیت شامل هیچ چرخشی در خود حالت ها نشود.
مفهوم تقارن چرخشی قوی در اتوماتای سلولی در تصویر زیر نشان داده شده است.
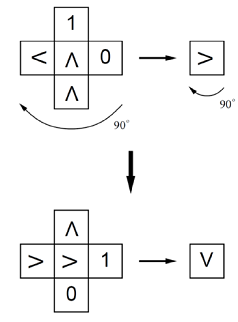
در غیر این صورت به چرخش متقارن، ضعیف می گویند. در یک اتوماتای سلولی با تقارن چرخشی ضعیف، برخی از حالت ها جهت دار هستند و چرخش یک موقعیت، به تنظیمات چرخشی آن حالت ها نیز نیاز دارد.
در مدل اتوماتای سلولی نیومان تقارن چرخشی ضعیف اتخاذ شده بود. تقارن چرخشی ضعیف در اتوماتای سلولی در تصویر زیر نشان داده شده است.
اگر یک تابع انتقال حالت فقط به مجموع حالت های سلول ها در همسایگی بستگی داشته باشد، آن گاه اتوماتای سلولی را «جامع» (Totalistic) می گویند.
بر اساس تعریف، چنین توابع انتقال حالتی متقارن چرخشی هم هستند.
فرض جامع بودن، طراحی مدل های اتومات سلولی را بسیار ساده تر می کند، اما با این حال، هنوز هم می توانند گستره وسیعی از دینامیک های پیچیده را تولید کنند.






|
|

|

|
| نماد اعتماد الکترونیک | نشان ملی ثبت | گواهی شامد ارشاد |
![]()
![]()
![]()
![]()
![]()
![]()
© کلیه حقوق مادی و معنوی این وب سایت متعلق به داده پردازان هومان پویان می باشد.

