خانه
اپلیکیشن زینگ
آشنایی و همکاری
سامانه صادرات و واردات
فروشگاه
خدمات اطلاعاتی
اخبار و مقالات
تماس با ما


کنترل سرعت موتور بدون میکروکنترلر:
در این آموزک می خواهیم مداری بسازیم که بدون نیاز به هیچ گونه میکروکنترلری بتوانیم سرعت یک موتور جریان مستقیم را کنترل کرد.قلب این مدار از یک آی سی 555 ساخته شده است. بلوگ دیاگرام و شکل آی سی در شکل 1 رسم شده است.
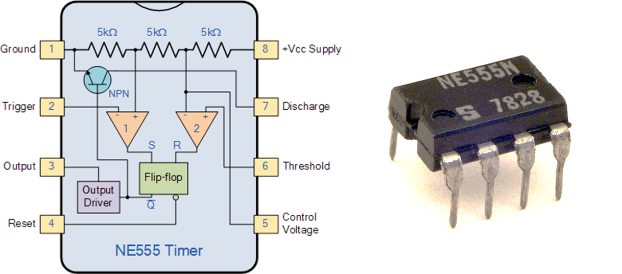
شکل 1: شکل و بلوک دیاگرام آی سی 555
پایه های 1 و 8 زمین و تغذیه آی سی هستند. پایه شماره 2 تریگر نام دارد و اگر ولتاژ آن کمتر از یک سوم ولتاژ تغذیه شود، خروجی آی سی که پایه شماره 3 است یک منطقی (ولتاژی نزدیک تغذیه آی سی) خواهد شد.
پایه شماره 6 آستانه است و اگر ولتاژ آن بیشتر از دو سوم ولتاژ تغذیه شود، خروجی آی سی صفر منطقی می شود و همین طور پایه شماره 7 (تخلیه) نیز اتصال کوتاه می شود.
پایه شماره 4 برای ریست کردن آی سی و در نهایت پایه 5 ولتاژ کنترل را تعریف می کنند. با کنترل صحیح پایه های این آی سی می توان یک سیگنال PWM ساخت و از طریق تغییر چرخه کاری (Duty Cycle) آن سرعت موتور را کنترل کرد.
سیگنال PWM با چرخه کاری های متفاوت در شکل در شکل 2 رسم شده است. میانگین این سیگنال متناسب با چرخه کاری است.
از طرفی به دلیل اینکه موتورهای جریان مستقیم یک دینامیک سرعت پایین است، به میانگین سیگنال ورودی پاسخ می دهد. در نتیجه با تغییر چرخه کاری می توان سرعت موتور را تغییر داد.

شکل 2: سیگنال PWM با چرخه کاری های متفاوت
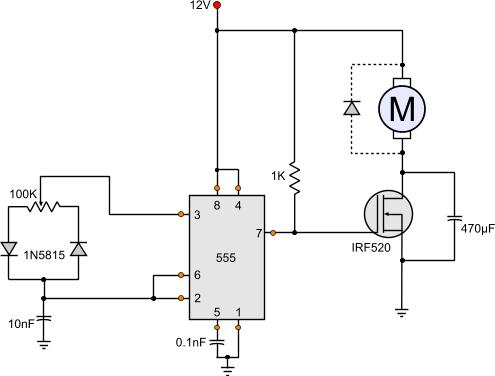
مداری که سیگنال بالا را تولید می کند در شکل 3 رسم شده است. در این مدار خازن C1 همواره در حال شارژ و دشارژ است.
زمانی که ولتاژ آن به پایین تر از یک سوم تغذیه رسید، خروجی آی سی یک منطقی و اگر ولتاژ آن به بالاتر از دو سوم تغذیه رسید، ولتاژ خروجی صفر منطقی خواهد شد. برای تولید سیگنال PWM با چرخه کاری متفاوت از پتانسیومتر R2 و دیودهای D1 و D2 استفاده می کنیم.
این دیود ها باعث می شود که سرعت شارژ و دشارژ خازن متفاوت باشد و در نتیجه چرخه کاری تغییر خواهد کرد. خازن C2 برای حذف نویز های فرکانس بالا در منبع تغذیه و عملکرد پایدار آی سی استفاده می شود.
همچنین برای جلوگیری از خراب شدن آی سی ناشی از ولتاژ نیروی محرکه موتور در هنگام خاموش شدن، دیود D3 در دو سر آن قرار می گیرد.

شکل 3: مدار تولید سیگنال PWM
جریان ماکزیمم خروجی آی سی 555 حدود 200 میلی آمپر است. در نتیجه از مدار بالا فقط برای کنترل موتورهای خیلی کوچک استفاده می شود. برای کنترل موتورهای خیلی بزرگ لازم است از یک تقویت کننده جریان استفاده شود.
این امر توسط یک ترانزیستور دوقطبی و یا اثر میدان انجام خواهد شد. شکل زیر مدار کنترل سرعت برای موتورهای جریان بالا را نشان می دهد.






|
|

|

|
| نماد اعتماد الکترونیک | نشان ملی ثبت | گواهی شامد ارشاد |
![]()
![]()
![]()
![]()
![]()
![]()
© کلیه حقوق مادی و معنوی این وب سایت متعلق به داده پردازان هومان پویان می باشد.

