خانه
اپلیکیشن زینگ
آشنایی و همکاری
سامانه صادرات و واردات
فروشگاه
خدمات اطلاعاتی
اخبار و مقالات
تماس با ما


کنترل مقاوم و کنترل تطبیقی:
برای غلبه بر تغییرات پارامتر که در محدوده های کران دار قرار دارد، می توان یک کنترل کننده فیدبک با بهره ثابت طراحی کرد.

نمودار بلوکی چنین کنترل کننده ای در شکل 2 نشان داده شده است که در آن، G(s) تابع تبدیل دستگاه وC(s) تابع تبدیل کنترل کننده است.
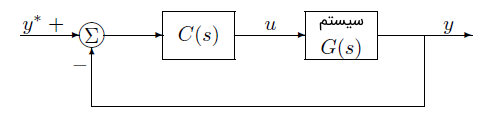
تابع تبدیل ازy∗بهy به صورت زیر به دست می آید:

که در آن، C(s) باید به گونه ای انتخاب شود که سیستم حلقه بسته، علی رغم تغییرات پارامتر یا نامعینی هایG(s)، پایدار بوده و در محدوده فرکانس مورد نظر، y≈y∗ باشد. این شرط آخر با انتخابC(s) به طوری که بهره حلقه|C(jω)G(jω)|، در صورت امکان، در طیف فرکانسیy∗ بزرگ باشد، قابل حصول است.
البته این بهره حلقه بزرگ الزامات پایداری حلقه بسته را نقض نمی کند. با طراحیC(s) به گونه ای که تغییراتG(s) در محدوده مشخصی باشند، می توان به اهداف ردیابی و پایداری دست یافت.
البته لازم به ذکر است که کنترل مقاوم به عنوان یک سیستم تطبیقی در نظر گرفته نمی شود؛ حتی اگر بتواند دسته های خاصی از نامعینی های پارامتری و دینامیکی را مدیریت کند.
جدول بندی بهره:
مدل (1) هواپیما را در نظر بگیرید که برای هر نقطه کارi(i=1,2,…,N) داده شده و پارامترهایAi، Bi، Ci و Di
آن معلوم هستند.
برای نقطه کارi، می توان یک کنترل کننده فیدبکی با بهره های ثابتθi طراحی کرد که الزامات عملکرد مدل خطی مربوطه را برآورده کند.
این منجر به کنترل کنندهC(θ)با مجموعه بهره های{θ1,θ2,…,θi,…,θN}برای N نقطه کار خواهد شد. وقتی نقطه کار i آشکار شود، بهره های کنترل کننده را می توان برای رسیدن بهθi مناسب تغییر داد. این مجموعه بهره ها از قبل محاسبه شده است.
انتقال یا گذار بین نقاط کار مختلف که منجر به تغییرات پارامتر قابل توجهی می شود را می توان با درون یابی یا افزایش تعداد نقاط کار مدیریت کرد.
دو عنصر مهم در پیاده سازی این روش، جدول جست وجو (Look-up Table) برای ذخیره مقادیرθi و اندازه گیری های کمکی سیستم (مرتبط با تغییرات در نقاط کار) است. این روش جدول بندی بهره (Gain Scheduling) نامیده می شود و در شکل 3 نشان داده شده است.
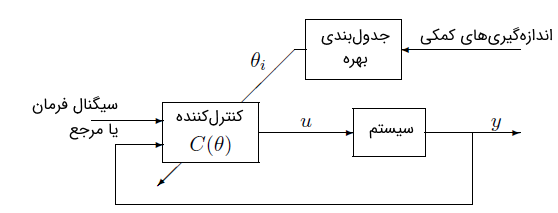
جدول بندی بهره از یک جدول جست وجو و منطق مناسب برای آشکارسازی نقطه کار و انتخاب مقدارθi از جدول تشکیل شده است.
در مورد هواپیما، اندازه گیری های کمکی سرعت (عدد ماخ) و فشار دینامیکی هستند. در این روش، تغییرات پارامتر سیستم را می توان با تغییر بهره های کنترل کننده به عنوان توابعی از اندازه گیری های کمکی جبران کرد.
مزیت جدول بندی بهره این است که بهره های کنترل کننده را می توان به سرعتِ پاسخ اندازه گیری های کمکی به تغییرات پارامتر تغییر داد.
البته، تغییرات مکرر و سریع بهره های کنترل کننده ممکن است به ناپایداری سیستم منجر شود. بنابراین، محدودیتی برای تعداد دفعات و سرعت تغییر بهره های کنترل کننده وجود دارد.
یکی از معایب جدول بندی بهره این است که ساز و کار تنظیم بهره های کنترل کننده به صورت برون خط (آفلاین) از قبل محاسبه شده و به همین دلیل، فیدبکی برای جبران اشتباه ندارد.
همچنین، تغییرات پیش بینی نشده در دینامیک سیستم ممکن است منجر به زوال عملکرد و یا حتی خرابی کامل آن شوند.
یک عیب دیگر این روش، هزینه های بالای طراحی و پیاده سازی است که با افزایش تعداد نقاط کار بیشتر نیز می شود.
علی رغم این محدودیت ها، جدول بندی بهره یک روش محبوب برای مدیریت تغییرات پارامتر در کنترل پرواز و سایر سیستم ها است.






|
|

|

|
| نماد اعتماد الکترونیک | نشان ملی ثبت | گواهی شامد ارشاد |
![]()
![]()
![]()
![]()
![]()
![]()
© کلیه حقوق مادی و معنوی این وب سایت متعلق به داده پردازان هومان پویان می باشد.

