خانه
اپلیکیشن زینگ
آشنایی و همکاری
سامانه صادرات و واردات
فروشگاه
خدمات اطلاعاتی
اخبار و مقالات
تماس با ما


پلتفرم های مختلف طراحی ربات هوشمند:
برای طراحی ربات هوشمند پلتفرم های مختلفی وجود دارد که در این قسمت به بررسی آن ها می پردازیم.

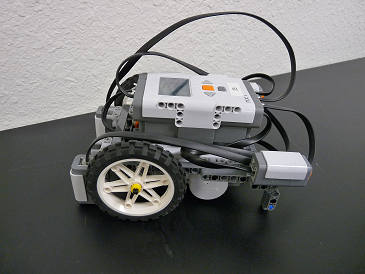
پلتفرم چرخی (Wheeled Platform):
این نوع پلتفرم می تواند هر تعداد چرخ داشته باشد. اما انواع سه، چهار و شش چرخ متداول تر هستند. توجه کنید که انواع دیگر مانند تک چرخ و یا دو چرخ نیز وجود دارند، اما به لحاظ دشواری در پیاده سازی رایج نیستند.
در حالت کلی دو نوع چرخ در یک ربات وجود دارد:
نوع توان دار (Powered) و نوع فاقد توان (Unpowered).
نوع اول توسط موتورها انرژی جنبشی دریافت می کنند و ربات را به سمت جلو و عقب حرکت می دهند. اما نوع دوم برای حفظ تعادل ربات از طریق ایجاد سطح تماس با زمین به کار می روند. تصویر زیر نمایی از یک طراحی ربات هوشمند با پلتفرم چرخی را نشان می دهد.
گردش:
ربات می تواند با استفاده از روش های مختلف حرکت گردشی داشته باشد.
گردش تانکی:
هدایت آکرمن:
این سیستم هدایت مشابه با سیستم هدایت مورد استفاده در خودروها است. پیاده سازی این روش به صورت عملی، پیچیده است؛ زیرا چرخ های داخلی و خارجی باید در زوایای متفاوتی بچرخند.
هدایت خرچنگی:
در این نوع سیستم، هر چرخ می تواند به صورت مستقل بچرخد. اگرچه این طراحی ربات هوشمند دارای استقلال زیادی است، اما به مکانیزم پچیده ای نیاز دارد تا بتواند هم تمام مجموعه موتور و چرخ دنده و چرخ ها را بچرخاند و هم توان را از یک موتور ثابت در جای خود، منتقل کند.
سیستم سه چرخ:
این سیستم می تواند در انواع مختلف مانند چرخ های توان دار مفصلی یا با دو چرخ توان دار ثابت یا ترکیبی از این دو حالت پیاده سازی شود.
پلتفرم ریلی:
این نوع پلتفرم از ریل هایی مانند آنچه در تانک ها مورد استفاده قرار می گیرد، بهره می برد. پلتفرم ریلی بیشتر برای کار در محیط هایی مانند گل و لای و سطوح نرم و یا شُل مانند فرش یا ماسه مورد استفاده قرار می گیرند؛ زیرا سطوح سفت، نیروی کششی افقی زیادی حین چرخش ربات فراهم می کنند و در نتیجه ربات در تعقیب مسیر مورد نظر کاربر ناموفق عمل خواهد کرد. تصویر زیر نمایی از یک ربات با پلتفرم ریلی را نشان می دهد.
ربات راه رونده (Walkers):
ربات های راه رونده نوعی از ربات ها هستند که به جای استفاده از چرخ یا ریل، به تقلید از انسان ها یا حیوانات، بر روی پاهای خود راه می روند. ساخت این نوع ربات ها از ساخت ربات های چرخ دار سخت تر است و چالشی واقعی حتی برای کسانی که در ساخت ربات ها تجربه کافی نیز دارند نیز محسوب می شود.
ربات های دو پا (Two-Legged):
این نوع از ربات ها به تقلید حرکت انسان ها می پردازند و پیاده سازی آن ها نسبت به سایر انواع ربات های راه رونده بسیار دشوارتر است.
در واقع می توان گفت چالش اصلی در طراحی ربات هوشمند، برقراری تعادل ربات هنگام اجرای عملیات حرکتی مختلف است.
کاربرد اصلی این ربات ها در دو مورد است، اولی ربات های انسان نما و دومی در مواردی که لازم است نیروی بسیار زیادی به صورت عمودی به سطحی وارد شود. ربات های راه رونده دو پا با قد بلندتر که معمولا برای تقلید انسان به کار می روند، برای ساخت با مشکلات بیشتری همراه هستند و به مدارات بیشتری برای حفظ تعادل، حرکات سریع و عملکرد دقیق احتیاج دارند.
از طرف دیگر ربات های راه رونده دو پا با قد کوتاه تر می توانند برای جابه جایی بارهای بزرگ مورد استفاده قرار می گیرند.
در ساخت این ربات ها می توان از سیستم های پنوماتیکی نیز بهره برد؛ زیرا این سیستم ها می توانند نیروی بسیار بیشتری نسبت به موتورها فراهم کنند. شکل زیر نمونه ای از دو ربات دو پا راه رونده را نشان می دهد.
ربات های چهار پا (Four-Legged):
ربات راه رونده چهار پا به تقلید از حرکات حیوانات 4 پا می پردازد. اما در اصل بسیاری از طراحی ها به گونه ای انجام می گیرد که برخلاف حیوانات که در هر لحظه دو پای خود را به حرکت در می آورند، ربات قادر خواهد بود در هر لحظه فقط یکی از پاهای خود را تکان دهد.
زیرا برای برقراری تعادل استاتیکی نیاز است که در هر لحظه سه پای دیگر بر روی زمین باشند، در حالی که حرکت دارای تعادل دینامیکی (حرکت دو پا در یک لحظه)، راه رفتن بسیار سریع تر و روان تری را فراهم می کند. نمونه ای از ربات راه رونده چهار پا در شکل زیر دیده می شود.
ربات های شش پا (Six-Legged):
این ربات ها برای تقلید حرکات حشرات به کار می روند. بسیاری از ربات های شش پا برای ایجاد تعادل استاتیکی در هر لحظه سه پای خود را حرکت می دهند.
به دلیل این که این ربات در هر لحظه نصفی از پاهای خود را بدون از دست دادن تعادل حرکت می دهد، پیاده سازی آن ها نسبت به ربات های چهار پا ساده تر است.
نکته: تعادل استاتیک به این معنی است که سازه در تمام زمان ها در تعادل است. به همین دلیل اگر ربات در هر لحظه از توقف باز بایستد، هرگز نمی افتد. از طرف دیگر تعادل دینامیک به این معنی است که ربات فقط زمانی که گام خود را کامل کند، در حالت تعادل قرار دارد و اگر در وسط کامل کردن گام خود از حرکت باز ایستد، خواهد افتاد.
اگرچه این ویژگی مطلوب به نظر نمی رسد، اما تعادل دینامیکی منجر به حرکات سریع تر و روان تری می شود.
این نوع تعادل به سنسورهای بیشتری جهت دریافت فیدبک تعادل نیاز دارند. انسان ها و حیوانات از تعادل دینامیکی برخوردار هستند.
شکل زیر نمایی از یک ربات شش پا را نشان می دهد.

ربات Whegs:
در این نوع از ربات ها از ترکیبی از چرخ و پا به منظور حرکت استفاده می شود.

ربات های چرخی توپی:
حرکت در این نوع از ربات ها بسیار به حرکت موس در کامپیوترهای قدیمی شباهت دارد. یک توپ در محفظه ای چنان نصب می شود که بتواند در تمام جهات آزادانه بچرخد.
همچنین دو عدد چرخ در اطراف این توپ با اختلاف 90 درجه با یکدیگر و موازی با زمین نصب می شوند. یکی از این چرخ ها برای حرکت چپ و راست و دیگری برای حرکت بالا و پایین است. ربات هایی که از سیستمی مشابه با سیستم این موس ها استفاده می کنند، در این نکته متفاوت هستند که چرخ ها به موتور متصل هستند.
به این طریق می توان توپ را وادار کرد که در هر جهت بچرخد. در این صورت ربات قادر خواهد بود تا در جهات راست و چپ و بالا و پایین حرکت کند اما نمی تواند حول محور عمودی خود بچرخد. برای چرخش ربات حول محور عمودی، باید از سه عدد توپ استفاده کرد. شکل زیر نمایی از این نوع ربات را نشان می دهد.






|
|

|

|
| نماد اعتماد الکترونیک | نشان ملی ثبت | گواهی شامد ارشاد |
![]()
![]()
![]()
![]()
![]()
![]()
© کلیه حقوق مادی و معنوی این وب سایت متعلق به داده پردازان هومان پویان می باشد.

