خانه
اپلیکیشن زینگ
آشنایی و همکاری
سامانه صادرات و واردات
فروشگاه
خدمات اطلاعاتی
اخبار و مقالات
تماس با ما


تغییر جهت چرخش در موتور DC:
اگرچه کنترل سرعت موتور DC با استفاده از یک ترانزیستور مزایای فراوانی دارد، اما در این روش یک عیب بزرگ نیز وجود دارد.

جهت چرخش در یک موتور DC که با این روش کنترل می شود همیشه یکسان است و به عبارت دیگر، یک مدار یک جهته (Uni-directional) محسوب می شود.
در بسیاری از کاربردها، لازم است تا موتور در هر دو جهت ساعتگرد و پادساعتگرد بچرخد.
برای کنترل جهت یک موتور DC، پلاریته منبع DC اعمال شده به اتصالات موتور باید معکوس شود تا شفت موتور در جهت مخالف بچرخد.
یک راه بسیار متداول و ساده برای کنترل جهت چرخش موتور DC، استفاده از آرایش های کلیدزنی متفاوت برای این موتورها است. در شکل زیر نمایی از دو مدار برای کنترل جهت چرخش موتور DC دیده می شود.
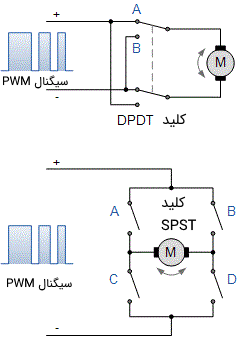
مدار اول، از یک کلید دو پل دو زبانه (Double-Pole, Double-Throw) یا DPDT برای کنترل پلاریته اتصالات موتور استفاده می کند.
با تغییر اتصالات، ولتاژ تغذیه دریافت شده در ترمینال های موتور معکوس می شود و در نتیجه موتور نیز در جهتی عکس جهت چرخش قبلی می چرخد.
مدار دوم اندکی پیچیده تر است و از چهار کلید تک پل تک زبانه (Single-Pole, Single-Throw) یا SPST در آرایش پل H استفاده می کند.
کلیدهای مکانیکی به صورت جفتی، برای کلیدزنی پیکربندی شده اند و باید در یک ترکیب خاص عمل کنند تا موتور DC متوقف شود.
به عنوان مثال، ترکیب کلیدهای A و D جهت چرخش رو به جلو (Forward) و ترکیب کلیدهای B و C چرخش عقبگرد (Reverse) را کنترل می کند.
ترکیب کلیدهای A و B یا C و D ترمینال های موتور را اتصال کوتاه می کند و منجر به توقف سریع موتور می شود.
اما نکته مهمی که وجود دارد این است که کنترل موتور با استفاده از این روش می تواند بسیار خطرناک باشد؛ زیرا ترکیب کلیدهای A و C یا B و D با یکدیگر، باعث اتصال کوتاه منبع تغذیه می شود.
اگرچه دو مدار بالا، برای تغییر جهت چرخش اغلب موتورهای DC کوچک مناسب است، اما در عمل استفاده از ترکیبات مختلف برای کلیدهای مکانیکی تنها با هدف تغییر جهت چرخش کلید ایده خوبی محسوب نمی شود.
در عوض می توانیم کلیدهای دستی را برای تنظیم رله های الکترومکانیکی تغییر دهیم و فقط یک دکمه تکی برای تغییر جهت حرکت موتور داشته باشیم. همچنین می توان از یک کلید دو طرفه CMOS 4066B حالت جامد استفاده کرد.
اما یک راه بسیار خوب برای رسیدن به کنترل سرعت دو جهته، اتصال موتور به یک مدار نوع پل H ترانزیستوری است. در شکل زیر نمایی از یک پیکربندی پل H ترانزیستوری نشان داده شده است.
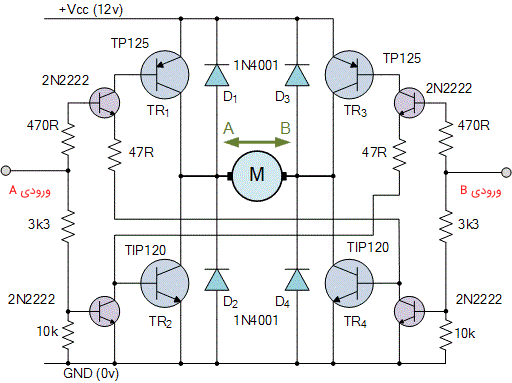
دلیل نام گذاری پل H ترانزیستوری نشان داده شده در بالا، این است که آرایش کلیدها (رله های الکترومغناطیسی یا ترانزیستورها) در این مدار شبیه به حرف H است و موتور در وسط این چهار کلید قرار می گیرد.
ترانزیستور یا MOSFET پل H، معمولا یکی از متداول ترین مدارت کنترل سرعت دو جهته موتورهای DC محسوب می شود.
در این مدار از جفت ترانزیستورهای مکمل NPN یا PNP در هر شاخه استفاده می شود و این ترانزیستورها به صورت دو تایی با یکدیگر کلیدزنی می شوند و موتور را کنترل می کنند.
ورودی کنترل A، موتور را در یک جهت، یعنی چرخش رو به جلو، راه اندازی می کند. اما ورودی کنترل B باعث چرخش موتور در جهت دیگر، یعنی چرخش عقبگرد موتور می شود.
بنابراین با کلیدزنی یا خاموش و روشن کردن ترانزیستورها در موقعیت مورب یا قطری پل H، می توان جهت چرخش موتور را کنترل کرد.
به عنوان مثال، زمانی که ترانزیستور TR1 روشن و ترانزیستور TR2 خاموش باشند، نقطه A به منبع تغذیه یا VCC متصل می شود و اگر ترانزیستور TR3 خاموش و ترانزیستور TR4 روشن باشند، نقطه B به زمین یا ولتاژ صفر ولت متصل می شود.
در این حالت موتور در جهتی می چرخد که متناظر با این باشد که نقطه A به ولتاژ مثبت و نقطه B به ولتاژ منفی متصل شده باشد.
اگر حالت کلیدزنی برعکس شود، یعنی ترانزیستور TR1 خاموش، ترانزیستور TR2 روشن، ترانزیستور TR3 روشن و ترانزیستور TR4 خاموش باشد، آن گاه جریان در موتور در جهتی برعکس به گردش در می آید و در نتیجه موتور نیز در جهت معکوس می چرخد.
بنابراین با اعمال سطوح منطقی متفاوت صفر و یک به ورودی های A و B، جهت گردش موتور مانند جدول زیر کنترل می شود.

این نکته بسیار اهمیت دارد که هیچ ترکیب دیگری از ورودی ها مجاز نیستند؛ زیرا ممکن است باعث اتصال کوتاه شدن منبع تغذیه شوند. به عنوان مثال، اگر هر دو ترانزیستور TR1 و TR2 در یک لحظه روشن باشند، فیوز در این مدار می سوزد.
همان طور که در کنترل سرعت یک جهته موتور DC بیان کردیم، سرعت چرخش موتور را نیز می توان با استفاده از مدولاسیون پهنای پالس یا PWM کنترل کرد.
بنابراین، با استفاده از ترکیب کلیدزنی پل H با کنترل PWM، می توان هم جهت و هم سرعت چرخش موتور را با دقت بالایی کنترل کرد.
آی سی های آشکارساز شفت، مانند آی سی SN754410 یا آی سی L298N که دارای دو پل H است، هم اکنون به صورت تجاری در دسترس هستند.
این آی سی ها دارای تمام ادوات منطقی لازم برای کنترل و نیز امنیت موتور هستند و به صورت اختصاصی به عنوان مدار کنترل سرعت دو جهته موتورهای DC طراحی و ساخته شده اند.






|
|

|

|
| نماد اعتماد الکترونیک | نشان ملی ثبت | گواهی شامد ارشاد |
![]()
![]()
![]()
![]()
![]()
![]()
© کلیه حقوق مادی و معنوی این وب سایت متعلق به داده پردازان هومان پویان می باشد.

