خانه
اپلیکیشن زینگ
آشنایی و همکاری
سامانه صادرات و واردات
فروشگاه
خدمات اطلاعاتی
اخبار و مقالات
تماس با ما


تعریف انکودرهای چرخشی در سنسورهای موقعیت:
انکودرهای چرخشی (Rotary Encoders) نوع دیگری از سنسورهای موقعیت هستند و شبیه به پتانسیومترهایی عمل می کنند که در قسمت قبل مورد بررسی قرار گرفتند.

اما این نوع از سنسورهای موقعیت، ادوات غیر تماسی و نوری محسوب می شوند که برای تبدیل موقعیت زاویه ای یک شفت چرخان به کدهای آنالوگ یا دیجیتال مورد استفاده قرار می گیرند.
به عبارت دیگر، این نوع از سنسورهای حرکتی قادر هستند که حرکت چرخشی مکانیکی را به سیگنال های الکتریکی (ترجیحا دیجیتال) تبدیل کنند.
تمام انکودرهای نوری (Optical Encoders) بر اساس قاعده یکسانی عمل می کنند. نور منتشر شده توسط یک LED یا منبع نور مادون قرمز از یک دیسک کدگذاری شده چرخشی با رزولوشن بالا عبور می کند که حاوی الگوهای کدهای مورد نیاز است.
این کدها می توانند کدهای باینری، کدهای گری (Gray) یا کدهای BCD باشند. آشکارسازهای نوری دیسک را هنگام چرخش اسکن کرده و یک مدار الکترونیکی کدهای دریافتی را به فرم دیجیتال پردازش کرده و نهایتا یک رشته از پالس های خروجی باینری تولید می کند.
این پالس های خروجی به یک کنترل کننده خارجی ارسال می شوند و کنترل کننده می تواند موقعیت زاویه ای شفت موتور را تعیین کند.
انکودر موقعیت افزایشی:
انکودر افزایشی (Incremental Encoder) را با عنوان انکودر تربیعی (Quadrature Encoder) یا انکودر گردان نسبی نیز می شناسند.
این نوع از انکودرها سنسورهای موقعیت بسیار ساده ای محسوب می شوند. خروجی این سنسورها یک دنباله از پالس های مربعی است که توسط آرایشی از فتوسل به عنوان یک دیسک کدگذاری شده تولید می شود.
سطح دیسک کدگذاری شده در واقع از ترکیب فضاهای شفاف و خطوط تیره ای تشکیل می شود که با فاصله معین از یکدیگر قرار گرفته اند و به هر کدام از آن ها سگمنت یا بخش گفته می شود.
این صفحه دیسک در اطراف منبع نوری حرکت یا دوران می کند. انکودر قادر است که هنگام شمارش، رشته ای از پالس های موج مربعی را ایجاد کند که این پالس های تولیدی برای تشخیص موقعیت زاویه ای شفت گردان روتور مورد استفاده قرار می گیرند.
نمایی از دیسک در انکودر افزایش و سگمنت های موجود روی آن را می توان در تصویر زیر مشاهده کرد.

انکودرهای افزایشی دارای دو خروجی جداگانه هستند که به آن ها خروجی های تربیعی (Quadrature Outputs) گفته می شود.
این دو خروجی با یکدیگر 90 درجه اختلاف فاز دارند. در واقع کاربرد اصلی خروجی های تربیعی این است که جهت گردش شفت از روی آن ها تعیین می شود.
تعداد سگمنت های شفاف و تیره موجود روی دیسک یا به عبارت دیگر تعداد شکاف ها در انکودر به عنوان عامل تعیین کننده رزولوشن سنسور در نظر گرفته می شود.
با افزایش تعداد خطوط تیره در الگوی دیسک، رزولوشن انکودر بر حسب درجه در چرخش نیز افزایش می یابد. دیسک های کدگذاری شده معمولی دارای رزولوشن بالاتر از 256 پالس و یا 8 بیت در هر چرخش هستند.
ساده ترین انکودر افزایشی تاکومتر (Tachometer) نام دارد. این نوع انکودر دارای یک خروجی موج مربعی تکی می باشد و معمولا در کاربردهای تک جهته (Unidirectional) مورد استفاده قرار می گیرد که در آن فقط به اطلاعات ساده موقعیت یا سرعت نیاز است.
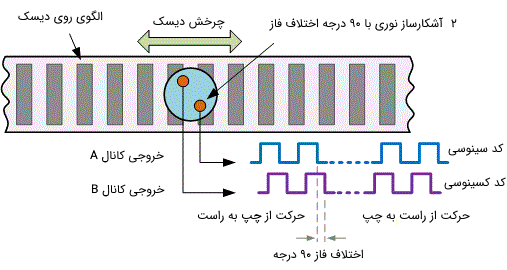
انکودرهای تربیعی یا موج سینوسی در صنعت متداول ترین نوع انکودر محسوب می شوند؛ زیرا این انکودرها دارای دو خروجی موج مربعی هستند که کانال A و کانال B نام دارند و قادرند جهت حرکت یا چرخش را نیز مشخص کنند.
این نوع از انکودرها از دو آشکارساز نوری (Photo Detector) استفاده می کنند که 90 درجه با یکدیگر اختلاف فاز دارند، بنابراین دو سیگنال خروجی سینوسی و کسینوسی تولید می کنند. نمایی از انکودر افزایشی و سیگنال های خروجی از آن را می توان در تصویر زیر مشاهده کرد.
با استفاده از تابع ریاضی آرک تانژانت می توان زاویه شفت را بر حسب رادیان محاسبه کرد.
معمولا دیسک نوری که در انکودرهای موقعیت چرخشی مورد استفاده قرار می گیرند، دارای شکل دایره ای هستند، بنابراین رزولوشن انکودر را می توان با استفاده ازθ=360n به دست آورد که در آن n برابر با تعداد سگمنت های موجود روی دیسک است.
به عنوان مثال، تعداد سگمنت های مورد نیاز برای داشتن یک انکودر افزایشی با رزولوشن 1 درجه با استفاده از1∘=360n محاسبه می شود.
بنابراین تعداد پنجره ها برابر باn=360 به دست می آید. همچنین جهت چرخش را می توان با استفاده از این که کدام یک از کانال ها، کانال A یا کانال B، ابتدا خروجی را تولید می کنند، مشخص کرد.
اگر A مقدم بر B باشد یا B مقدم بر A باشد، آن گاه دو جهت متفاوت برای چرخش وجود دارند. تصویر زیر نمایی از سیگنال های خروجی در یک انکودر افزایشی هنگام چرخش شفت در دو جهت مختلف را نشان می دهد.

یکی از مهم ترین معایب انکودرهای افزایشی هنگام استفاده به عنوان سنسور موقعیت، این است که برای تعیین زاویه مطلق شفت در یک چرخش خاص به شمارنده ها (Counters) نیاز دارند.
همچنین اگر تغذیه سنسور برای یک لحظه قطع شود و یا انکودر به دلیل کثیف بودن دیسک و یا نویز، یک پالس را از دست بدهد، اطلاعات زاویه ای تولید شده توسط سنسور مقدار اشتباهی را نشان می دهد.
یک راه برای غلبه بر این مشکلات، استفاده از انکودرهای موقعیت نوع مطلق (Absolute Position Encoders) است.






|
|

|

|
| نماد اعتماد الکترونیک | نشان ملی ثبت | گواهی شامد ارشاد |
![]()
![]()
![]()
![]()
![]()
![]()
© کلیه حقوق مادی و معنوی این وب سایت متعلق به داده پردازان هومان پویان می باشد.

