خانه
اپلیکیشن زینگ
آشنایی و همکاری
سامانه صادرات و واردات
فروشگاه
خدمات اطلاعاتی
اخبار و مقالات
تماس با ما


محاسبات عملکرد موتور DC:
در اغلب کاربردها، از موتورهای DC برای جابه جایی بارهای مکانیکی استفاده می شود. در برخی موارد لازم است با تغییر بار موتور، سرعت ثابت بماند.

در مواردی نیز باید سرعت در محدوده بزرگی کنترل شود. بنابراین، بررسی رابطه بین گشتاور و سرعت موتور ضروری است.
تنظیم سرعت:
تنظیم سرعت به عنوان تغییر سرعت به ازای اعمال بار کامل به موتور تعریف می شود:

که در آن، Nno−load سرعت بی باری وNfull−load سرعت در بار کامل است.
مشخصه گشتاور-سرعت:
برای استفاده مؤثر از یک موتور DC در یک کاربرد مشخص، لازم است منحنی مشخصه آن را بشناسیم. برای هر موتور، یک منحنی گشتاور-سرعت و یک منحنی توان وجود دارد.
رابطه بین گشتاور و سرعت در انتخاب یک موتور DC برای کاربردی خاص مهم است.
موتور DC با تحریک جداگانه:
یک موتور DC با تحریک جدا را در نظر بگیرید که در شکل 5 نشان داده است.
از معادله (5) و (7) دو عبارت برای ولتاژ القایی داریم:

گشتاور تولیدی روتور (آرمیچر) برابر است با:

از معادله (12)، می توان جریان آرمیچر را به دست آورد:

با جایگذاریIa در معادله (11) و بازنویسیی عبارات، داریم:

بنابراین، گشتاور روتور را می توان به صورت زیر نوشت:

این معادله، رابطه بین گشتاور و سرعت یک موتور تحریک جداگانه را نشان می دهد. اگر ولتاژ ترمینالVT و شار ϕ ثابت نگه داشته شوند، رابطه سرعت-گشتاور یک خط راست نزولی خواهد بود.
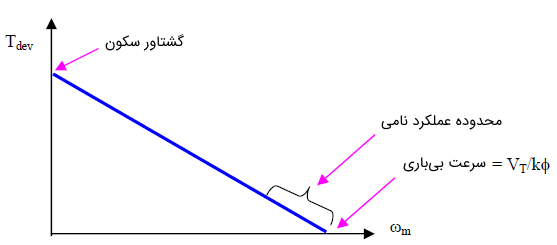
نمودار بالا، منحنی گشتاور-سرعت یک موتور DC تحریک مستقل را نشان می دهد. لازم به ذکر است که گشتاور رابطه عکس با سرعت شفت دارد.
به عبارت دیگر، یک مصالحه بین اندازه گشتاور و سرعت موتور القایی برقرار است. مشخصه های موتور به عنوان دو نقطه روی نمودار مشخص می شوند:
بار موتور نقطه کار نهایی روی منحنی گشتاور را تعیین می کند. همان گونه که در تصویر زیر نشان داده شده است، وقتی بار به موتور وصل شود، برهم کنش بین گشتاور مورد تقاضای بار و گشتاور تولیدی موتور، نقطه کار را تعیین می کند.
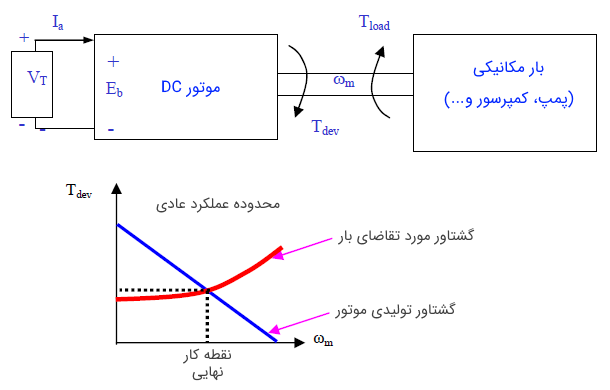
شکل بالا تعامل بین موتور DC و بار مکانیکی را نشان می دهد. گشتاور راه اندازی موتور بزرگ تر از گشتاور بار است.
اختلاف بین این دو گشتاور سبب چرخش موتور می شود. وقتی موتور شروع به چرخش کند، سرعت آن زیاد شده و گشتاور تولیدی اش کاهش می یابد. در نهایت، وقتی دو گشتاور یکدیگر را متعادل کنند، موتور به یک نقطه کار پایدار می رسد.
موتور DC شنت:
موتور DC شنت معادلات گشتاور مشابهی با موتور تحریک مستقل دارد و مشخصه گشتاور-سرعت آن، مشابه شکل 8 است.
موتور DC سری:
مشخصه موتور DC سری را می توان مشابه آنچه در بالا گفتیم، تحلیل کرد. در موتورهای سری، سیم پیچی میدان، به صورت سری با سیم پیچی آرمیچر قرار گرفته است (شکل 8).
گشتاور روتور به صورت زیر است:
Tdev=KϕIa
با فرض اینکه شار رابطه مستقیمی با جریان میدان دارد (یعنی اشباع مغناطیسی وجود ندارد) و از آنجایی که در یک موتور سری، If=Ia، خواهیم داشت:

که در آن، Kf یک ثابت است که به تعداد دورهای سیم پیچ میدان، هندسه مدار مغناطیسی و مشخصه B-H آهن بستگی دارد.
بنابراین، گشتاور تولیدی روتور را می توان به صورت زیر نوشت:

با اعمال KVL به مدار معادل (و صرف نظر کردن ازLf در شرایط حالت ماندگار)، خواهیم داشت:

با جایگذاری این رابطه در معادله (18)، خواهیم داشت:

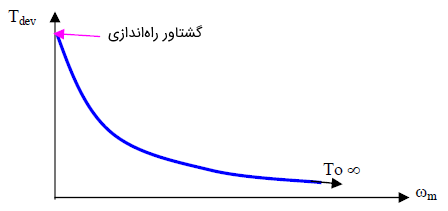
گشتاور نیز برابر است با:

اگر ولتاژ ترمینالVT را ثابت در نظر بگیریم، گشتاور با مربع سرعت رابطه معکوس دارد (شکل 9). در سرعت پایین یک گشتاور بالا و در سرعت بالا، گشتاور پایین به دست می آید.






|
|

|

|
| نماد اعتماد الکترونیک | نشان ملی ثبت | گواهی شامد ارشاد |
![]()
![]()
![]()
![]()
![]()
![]()
© کلیه حقوق مادی و معنوی این وب سایت متعلق به داده پردازان هومان پویان می باشد.

