خانه
اپلیکیشن زینگ
آشنایی و همکاری
سامانه صادرات و واردات
فروشگاه
خدمات اطلاعاتی
اخبار و مقالات
تماس با ما


انواع سروو موتورها:
سروموتورها را می توان بر اساس کاربردی که دارند، در دو دسته سروموتورهای AC و سروموتورهای DC دسته بندی کرد.

همچنین، سروموتورها را می توان از سه جنبه مورد ارزیابی قرار داد:
نخست بر اسال جریان کاری (AC یا DC)، دوم بر اساس نوع کموتاسیون (استفاده یا عدم استفاده از جاروبک) و سوم چرخش روتور نسبت به میدان مغناطیسی گردان (سنکرون یا آسنکرون).
ابتدا درباره جنبه نخست بحث می کنیم. AC یا DC بودن یکی از معیارهای اساسی دسته بندی یک موتور بر اساس نوع جریانی است که آن را تغذیه می کند.
از دیدگاه عملکرد، تفاوت اولیه بین موتورهای AC و DC در توانایی ذاتی کنترل سرعت است. در یک موتور DC، سرعت مستقیماً با منبع ولتاژ با بار ثابت ارتباط دارد و در موتور AC، سرعت به فرکانس ولتاژ اعمالی و تعداد قطب های مغناطیسی وابسته است.
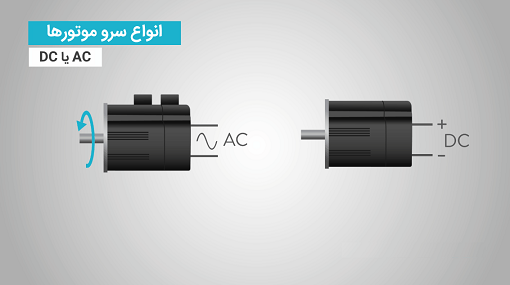
هر دو نوع موتورهای AC و DC در سیستم های سروو مورد استفاده قرار می گیرند. علی رغم آنکه موتورهای AC جریان بیشتری مصرف می کنند، استفاده از آن ها در کاربردهای سروو مانند ربات ها، کارخانه ها و سایر کاربردهای صنعتی رایج تر است که در آن ها تکرار و دقت بالا مورد نیاز است.
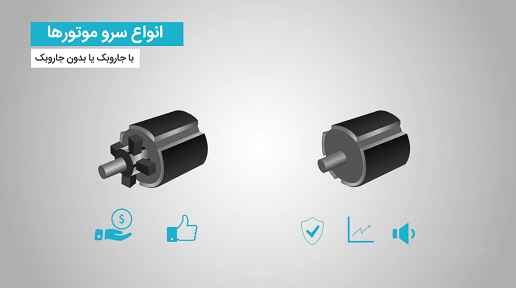
جنبه دیگر دسته بندی موتورها، وجود یا عدم وجود جاروبک در آن ها است. یک سروو موتور DC به صورت مکانیکی و با استفاده از کموتاتور یا به صورت الکترونیکی بدون جاروبک عمل کموتاسیون را انجام می دهد.
موتورهای دارای جاروبک معمولاً ارزان تر هستند و عملکرد آن ها ساده تر است؛ در حالی که موتورهای بدون جاروبک قابل اعتمادتر هستند و بازده بیشتر و نویز کمتری دارند.
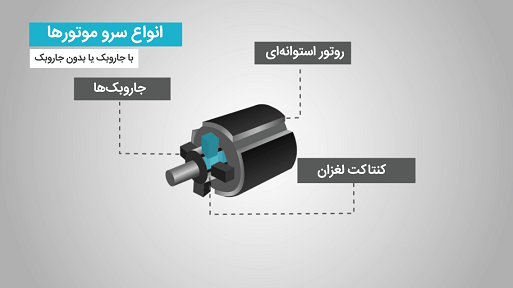
کموتاتور یک سوئیچ یا کلید الکتریکی چرخان است که به صورت متناوب جهت جریان بین روتور و مدار درایو (راه انداز) را تغییر می دهد.
کموتاتور از یک حلقه استوانه ای متشکل از چند بخش کنتاکت فلزی روی روتور تشکیل شده است. دو یا چند کنتاکت الکتریکی که «جاروبک» نام دارند، از یک ماده هادی مانند کربن ساخته شده و در مقابل کموتاتور تعبیه می شوند. هنگام چرخش روتور، جاروبک ها با بخش های رسانای کموتاتور تماس لغزشی خواهند داشت.
در حالی که اغلب موتورهای مورد استفاده در سیستم های سروو موتورهای AC بدون جاروبک هستند، موتورهای مغناطیس دائم با جاروبک نیز به دلیل سادگی و هزینه پایینی که دارند، مورد استفاده قرار می گیرند.
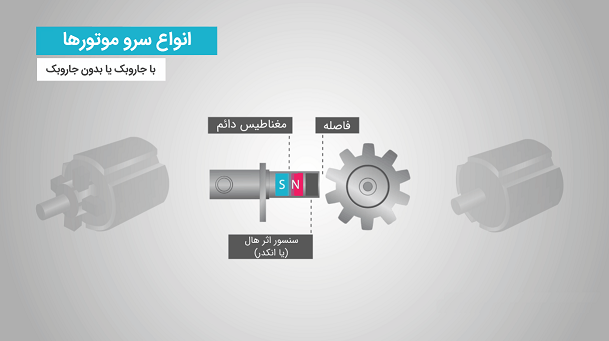
همچنین، رایج ترین نوع موتورهای DC با جاروبک که در کاربردهای سروو مورد استفاده قرار می گیرند، موتورهای DC مغناطیس دائم هستند.
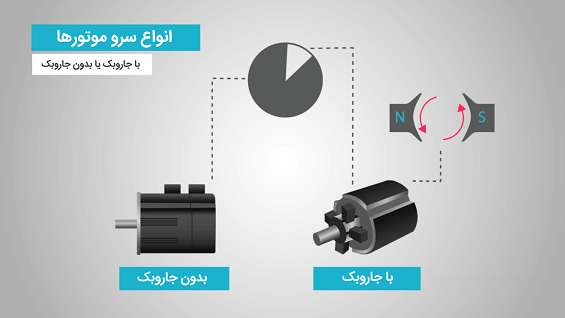
در موتورهای DC بدون جاروبک، جاروبک های فیزیکی و کموتاتور با یک معادل الکترونیکی که معمولاً از سنسور اثر هال یا یک انکدر تشکیل شده است جایگزین می شود.
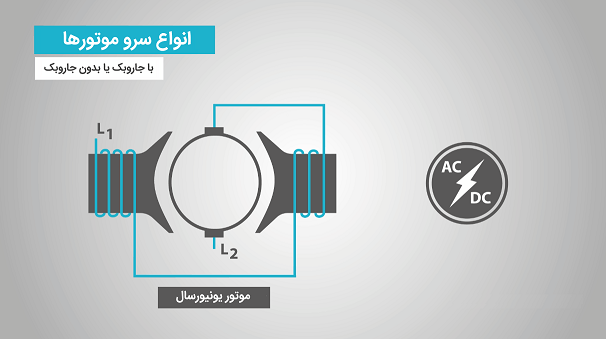
موتورهای AC معمولاً بدون جاروبک هستند، هرچند در برخی مدل ها، مانند موتور یونیورسال، که می تواند با هر دو توان AC و DC کار کند، جاروبک وجود دارد و عمل کموتاسیون به صورت مکانیکی انجام می شود.
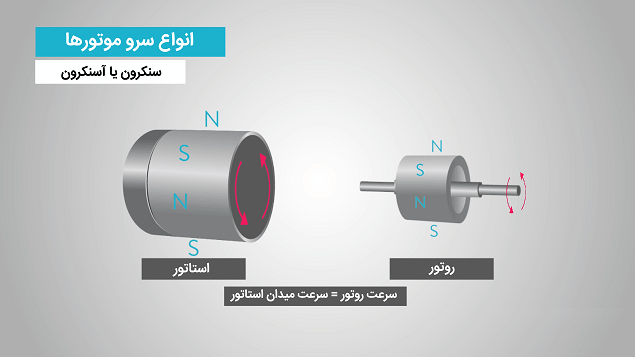
سومین و آخرین جنبه برای دسته بندی سروو موتورها، این است که روتور آن ها با سرعت سنکرون حرکت می کند یا آسنکرون.
در حالی که موتورهای DC اغلب در دو دسته با جاروبک و بدون جاروبک دسته بندی می شوند، دسته بندی موتورهای AC اغلب بر اساس سرعتشان نسبت به میدان مغناطیسی گردان تعیین می شود.
همان طور که گفتیم، در موتورهای AC، سرعت با فرکانس منبع ولتاژ و تعداد قطب های مغناطیسی تعیین می شود. این سرعت به سرعت سنکرون معروف است. بنابراین، در یک موتور سنکرون، روتور با سرعتی برابر با سرعت میدان مغناطیسی گردان می چرخد.
موتور آسنکرون، موتور القایی نیز نامیده می شود و سرعت چرخش آن کمتر از سرعت چرخش میدان است. البته سرعت یک موتور آسنکرون را می توان با چند روش مختلف مانند تغییر تعدد قطب ها و تغییر فرکانس منبع تغییر داد.
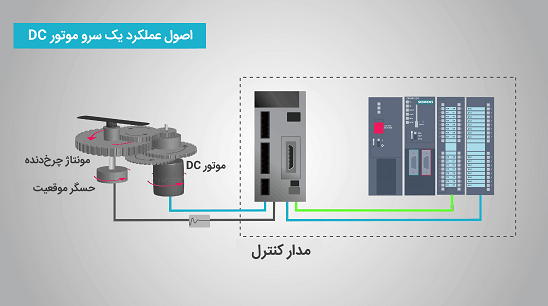
یک سروو موتور DC از چهار بخش اصلی تشکیل می شود: موتور DC، سنسور موقعیت، مجموعه چرخ دنده و مدار کنترل.
همان طور که گفتیم، سرعت مطلوب یک موتور DC با ولتاژ اعمالی به آن متناسب است. برای کنترل سرعت موتور، یک پتانسیومتر، ولتاژی را تولید می کند که به عنوان یکی از ورودی ها به تقویت کننده خطا وارد می شود.
در برخی مدارها، از یک پالس کنترل برای تولید ولتاژ مرجع متناظر با موقعیت یا سرعت مطلوب استفاده شده و به یک مبدل ولتاژ پهنای پالس اعمال می شود.
در کنترل دیجیتال، برای کنترل دقیق، یک PLC یا کنترل کننده حرکت دیگر برای تولید پالس ها بر اساس سیکل وظیفه به کار می رود.

سنسور سیگنال فیدبک، معمولاً یک پتانسیومتر است که ولتاژی را متناسب با زاویه مطلق شفت موتور در ساز و کار چرخ دنده تولید می کند. در نتیجه، مقدار ولتاژ فیدبک به ورودی تقویت کننده مقایسه کننده خطا وارد می شود.
تقویت کننده ولتاژ تولیدی موقعیت فعلی موتور، یعنی فیدبک پتانسیومتر و موقعیت مطلوب موتور را مقایسه کرده و یک ولتاژ خطای مثبت یا منفی تولید می کند. این ولتاژ خطا به آرمیچر موتور اعمال می شود. وقتی خطا زیاد شود، ولتاژ خروجی به آرمیچر موتور اعمال می شود.
موتور تا زمانی که خطا به صفر برسد می چرخد. اگر خطا منفی باشد، ولتاژ آرمیچر معکوس شده و در نتیجه آرمیچر در جهت عکس می چرخد.
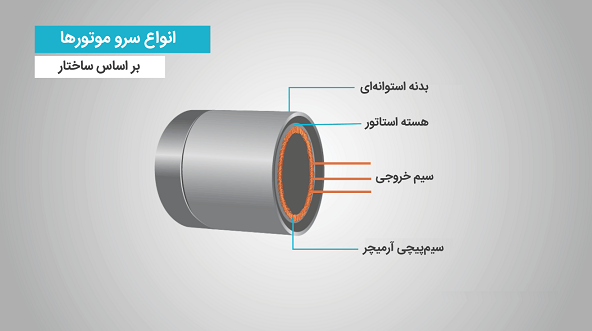
اصول عملکرد سروو موتورهای AC بر اساس ساختار دو نوع سروو موتور آسنکرون و سنکرون است. سروموتور AC سنکرون از استاتور و روتور تشکیل شده است. استاتور شامل یک قاب و بدنه استوانه ای و هسته استاتور است.
سیم پیچی آرمیچر به دور هسته استاتور پیچانده شده و به یک سیم متصل است که جریان موتور را تأمین می کند.
روتور از یک مغناطیس دائم تشکیل شده و نسبت به روتور نوع آسنکرون القایی که جریان روتور آن با الکترومغناطیس القا می شود متفاوت است. به همین دلیل، این نوع موتورها، سروو موتورهای بدون جاروبک نامیده می شوند.
هنگامی که میدان استاتور با ولتاژ تحریک شود، روتور میدان مغناطیسی گردان استاتور را با سرعت مشابه یا سنکرون با میدان تحریکی استاتور دنبال می کند و این همان لحظه ای است که با موتور نوع سنکرون مواجه خواهیم بود.
در روتور مغناطیس دائم، وقتی میدان استاتور بدون انرژی شده و متوقف می شود، به جریان نیازی نیست. این موتورها به دلیل نداشتن جریان روتور بازده بالاتری دارند.
وقتی موقعیت روتور نسبت به استاتور مورد نظر باشد، یک انکدر روی روتور قرار داده می شود که فیدبک به کنترل کننده سروو موتور را مهیا می کند.
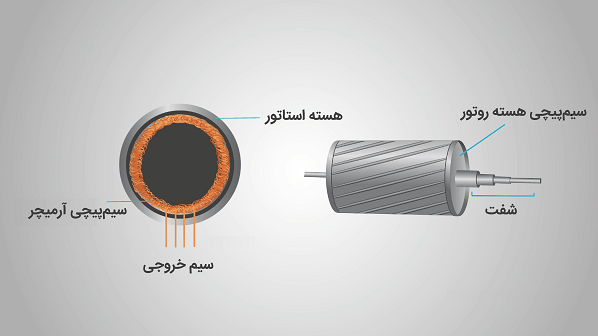
استاتور سروو موتور AC آسنکرون یا القایی از هسته استاتور، سیم پچی آرمیچر و سیم خروجی تشکیل شده است. اجزای روتور نیز شفت و سیم پیچی هسته آن هستند.
منبع AC فقط سیم پیچی استاتور را تغذیه می کند و سبب تولید میدان شار متناوب در اطراف سیم پیچی استاتور می شود. این میدان متناوب با سرعت سنکرون می چرخد و میدان مغناطیسی گردان (RMF) نام دارد. طبق قانون القای الکترومغناطیس فارادی، سرعت نسبی بین روتور و میدان چرخان استاتور سبب ایجاد نیروی الکترومغناطیسی در هادی های روتور می شود.
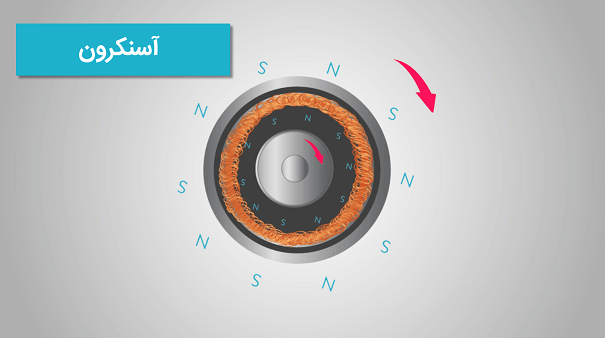
اکنون، جریان القایی روتور یک میدان شار متناوب در اطرافش تولید خواهد کرد.شار روتور از شار استاتور عقب تر است. روتور در جهت میدان دوار استاتور می چرخد و نمی تواند به سرعت میدان استاتور برسد و و به عبارتی، سنکرون شود. در نتیجه، آسنکرون خواهد بود.
کاربردهای سروو موتور:
سروو موتورها در سیستم های صنعتی و تجاری کاربردهای فراوانی دارند. برای مثال، در مفاصل ربات های صنعتی به کار می روند و زاویه حرکت دقیق را مهیا می کنند.
برای فوکوس خودکار دوربین ها، یک سروو درون دوربین تعبیه شده و موقعیت لنز را برای واضح کردن تصاویر به صورت دقیق تصحیح می کند.
در سیستم های مکان یابی، از سروو موتورها برای موقعیت یابی محور سمت و بلندی آنتن ها و تلسکوپ ها استفاده می شود.






|
|

|

|
| نماد اعتماد الکترونیک | نشان ملی ثبت | گواهی شامد ارشاد |
![]()
![]()
![]()
![]()
![]()
![]()
© کلیه حقوق مادی و معنوی این وب سایت متعلق به داده پردازان هومان پویان می باشد.

