خانه
اپلیکیشن زینگ
آشنایی و همکاری
سامانه صادرات و واردات
فروشگاه
خدمات اطلاعاتی
اخبار و مقالات
تماس با ما


مدهای کنترلی در کنترل کننده های PID:

کنترل کننده های PID سه مُد کنترلی دارند:
هر یک از این سه مد، واکنش متفاوتی نسبت به خطا دارند. مقدار پاسخ تولیدی هر مد کنترلی را می توان با تغییر تنظیمات کنترل کننده سامان داد. در ادامه، هر یک از این مدها را توضیح می دهیم.
مد کنترل تناسبی:
مد کنترل تناسبی، در اغلب موارد نیروی محرک کنترل کننده است. این مد، خروجی کنترل کننده را متناسب با مقدار خطا تغییر می دهد (شکل 4). اگر خطا بزرگ شود، عمل یا کنش کنترلی نیز بزرگ تر می شود.
پارامتر قابل تنظیم کنترل تناسبی، بهره کنترل کننده (Controller Gain) یا Kc نامیده می شود. هرچه بهره کنترل کننده بزرگ تر باشد، عمل کنترل تناسبیِ خطا را افزایش می دهد.
اگر بهره کنترل کننده در مقدار بسیار بالایی تنظیم شود، حلقه کنترل شروع به نوسان می کند و ناپایدار می شود.
از سوی دیگر، اگر بهره بسیار کم باشد، پاسخ به اغتشاشات یا تغییرات نقطه تنظیم، به اندازه کافی کارساز نخواهد بود.
P=KC×E
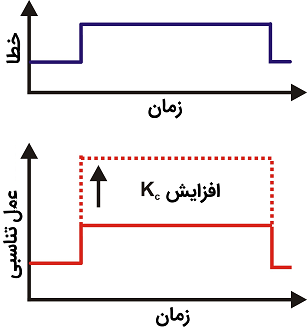
شکل 4: عمل کنترل تناسبی
تنظیم بهره کنترل کننده، بر مدهای کنترل انتگرالی و مشتقی نیز تأثیر می گذارد. به همین دلیل است که این پارامتر را بهره کنترل کننده می نامیم، نه بهره تناسبی.
در حالی که اغلب کنترل کننده ها از بهره کنترل کننده (Kc) به عنوان تنظیم تناسبی استفاده می کنند، برخی کنترل کننده ها از باند تناسبی (Proportional Band) یا PB بهره می برند که بر حسب درصد بیان می شود.
مد کنترل انتگرالی:
لزوم بازنشانی دستی، منجر به توسعه بازنشانی خودکار یا مد کنترل انتگرالی شده است. وقتی خطا وجود داشته باشد (متغیر فرایند در نقطه تنظیم نباشد)، مد کنترل انتگرالی خروجی کنترل کننده را به صورت پیوسته کم یا زیاد می کند تا خطا را به صفر کاهش دهد.
اگر خطا بزرگ باشد، مد انتگرالی خروجی کنترل کننده را به سرعت افزایش یا کاهش می دهد و اگر خطا کوچک باشد، تغییرات آرام تر رخ خواهد داد.
برای یک خطای مشخص، سرعت عمل انتگرالی با زمان تنظیم کنترل کننده انتگرالی (TI) سامان داده می شود. مقدار بزرگTI، موجب عمل انتگرالی کند می شود و مقدار کوچکTI، به عمل انتگرالی سریع می انجامد (شکل 5).
اگر زمان انتگرال بسیار بزرگ باشد، کنترل کننده بسیار کند خواهد بود و در صورتی که بسیار کوچک باشد، حلقه کنترل نوسانی و ناپایدار خواهد شد.
در شکل 5، TS بازه اجرای الگوریتم کنترل است که گاهی زمان نمونه برداری یا زمان اسکن نیز نامیده می شود.

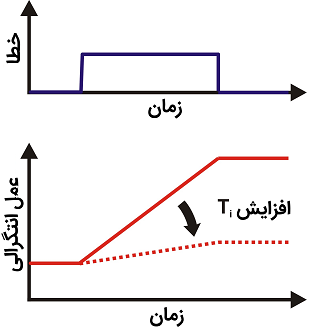
شکل 5: عمل کنترل انتگرالی
معادله یک کنترل کننده فقط انتگرالی به صورت زیر است:

مد کنترل مشتقی:
سومین مد کنترلی در یک کنترل کننده PID، مشتق است. کنترل مشتقی به ندرت در کنترل فرایندها مورد استفاده قرار می گیرد، اما در کنترل حرکت از آن استفاده بیشتری می شود.
این نوع کنترل کننده در کنترل فرایند نسبت به نویز اندازه گیری بسیار حساس است و تنظیم با استفاده از سعی و خطا را دشوارتر می کند.
با وجود این، استفاده از مد کنترل مشتق یک کنترل کننده، پاسخ حلقه کنترل را نسبت به مد کنترل PI که در ادامه بیان می کنیم، اندکی افزایش می دهد.
مد کنترل مشتقی، یک خروجی را بر اساس میزان تغییرات خطا (شکل 6) تولید می کند. وقتی تغییرات خطا زیاد باشد، مد مشتقی عمل کنترل بیشتری تولید خواهد کرد.
وقتی خطا تغییر نکند، عمل مشتقی صفر خواهد بود. مد مشتقی یک تنظیمات قابل تغییر دارد که زمان مشتق (TD) نامیده می شود.
هر چه زمان مشتق بیشتر باشد، عمل حاصل از مشتق بیشتری تولید خواهد شد. وقتی زمان مشتق بسیار طولانی باشد، نوسان هایی رخ می دهد و حلقه کنترل ناپایدار خواهد شد.

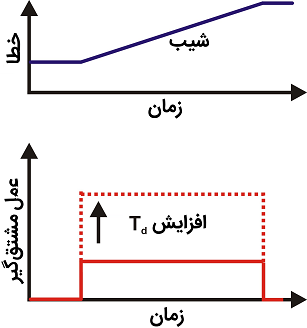
شکل 6: عمل کنترل مشتق
دو واحد اندازه گیری مورد استفاده در تنظیمات مشتق گیر یک کنترل کننده دقیقه و ثانیه هستند.






|
|

|

|
| نماد اعتماد الکترونیک | نشان ملی ثبت | گواهی شامد ارشاد |
![]()
![]()
![]()
![]()
![]()
![]()
© کلیه حقوق مادی و معنوی این وب سایت متعلق به داده پردازان هومان پویان می باشد.

