خانه
اپلیکیشن زینگ
آشنایی و همکاری
سامانه صادرات و واردات
فروشگاه
خدمات اطلاعاتی
اخبار و مقالات
تماس با ما


کنترل کننده تناسبی-انتگرالی و تناسبی-انتگرالی-مشتقی:

خروجی کنترل کننده تناسبی-انتگرالی (Proportional Integral Controller) یا PI، از مجموع عمل های کنترلی تناسبی و انتگرالی تشکیل می شود:

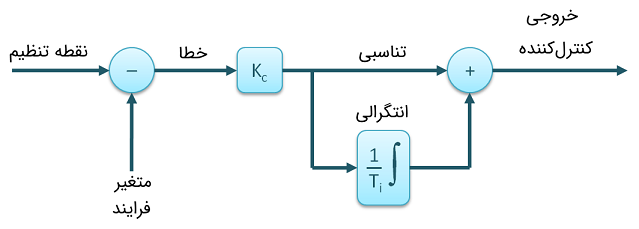
شکل 10: الگوریتم کنترل کننده PI
شکل 10 نشان می دهد که چگونه مد انتگرالی، خروجی کنترل کننده را برای قرار دادن دمای خروجی هیتر به نقطه تنظیم باز می گرداند. در مقایسه با شکل 9، کاملاً واضح است که کنترل انتگرالی آفست را حذف می کند.
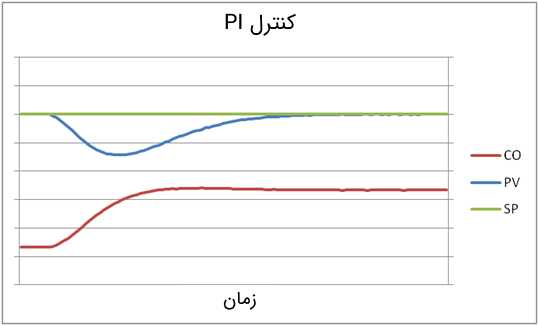
شکل 11: پاسخ کنترل کننده PI به یک اغتشاش
کنترل کننده تناسبی-انتگرالی-مشتقی:
خروجی کنترل کننده تناسبی-انتگرالی-مشتق گیر یا PID از مجموع عمل های کنترلی تناسبی، انتگرالی و مشتقی تشکیل شده است.
سازندگان، کنترل کننده های PID را در سه پیکربندی مختلف تولید می کنند. این سه پیکربندی تعاملی (Interactive)، غیرتعاملی (Noninteractive) و موازی (Parallel) نامیده می شوند. برخی تولیدکنندگان نیز این امکان را به وجود آورده اند که مشتری از بین پیکربندی های مختلف در نرم افزار کنترل کننده یک مورد را انتخاب کند.
کنترل کننده PID تعاملی:
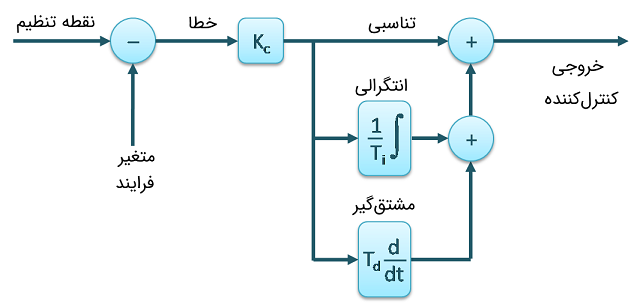
شکل زیر، نمودار بلوکی کنترل کننده PID تعاملی را نشان می دهد.

شکل 12: کنترل کننده PID تعاملی
خروجی این کنترل کننده برابر است با:

این کنترل کننده، سری (Series)، کلاسیک (Classical) یا حقیقی (Real) نیز نامیده می شود. کنترل کننده های پنوماتیکی و الکترونیکی اولیه دارای این پیکربندی بودند و هنوز هم کنترل کننده هایی با این پیکربندی وجود دارد.
قواعد تنظیم PID زیگلر-نیکولز (Ziegler-Nichols) برای این نوع کنترل کننده معرفی شده است.
کنترل کننده PID غیرتعاملی:
شکل زیر، نمودار بلوکی کنترل کننده PID غیرتعاملی را نشان می دهد.
شکل 13: کنترل کننده PID غیرتعاملی
خروجی این کنترل کننده برابر است با:

کنترل کننده غیرتعاملی، ایده آل (Ideal)، استاندارد (Standard) یا ISA نیز نامیده می شود. الگوریتم های تنظیم کُهِن-کُن (Cohen-Coon) و لاندا (Lambda) برای این نوع پیکربندی طراحی شده اند.
اگر از مشتق گیر استفاده نشود (Td=0)، آن گاه ساختارهای تعاملی و غیرتعاملی یکسان خواهند بود.






|
|

|

|
| نماد اعتماد الکترونیک | نشان ملی ثبت | گواهی شامد ارشاد |
![]()
![]()
![]()
![]()
![]()
![]()
© کلیه حقوق مادی و معنوی این وب سایت متعلق به داده پردازان هومان پویان می باشد.

